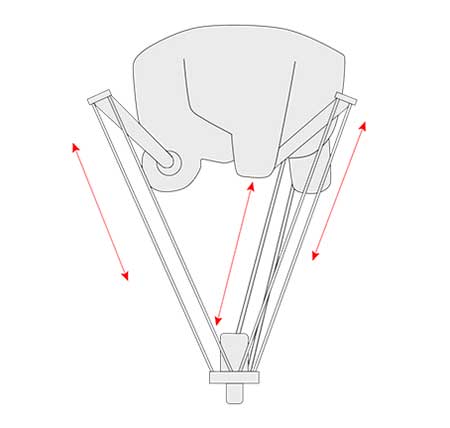
0 robot de conexión paralelaTipo de robot con tres brazos para controlar el posicionamiento del efector. Se utilizan normalmente en situaciones donde se requiere una operación a alta velocidad, que se consige al tener cada articulación control directo sobre el efector.2018-11-23