
six degrees of freedom
Los seis ejes en un robot se identifican como:
Eje 1 - Swing: Base giratoria
Eje 2 - Lower arm: Brazo inferior
Eje 3 - Upper arm: Brazo
Eje 4 - Rotation: Rotación
Eje 5 - Bending: Flexión
Eje 6 - Turning: Giro
Los ejes 1 a 3 son la cintura y el brazo, y del 4 al 6 van desde la muñeca hasta la punta de los dedos. Los tres primeros ejes llevan la muñeca a una posición específica, y los tres ejes siguientes la mueven libremente. Esta construcción de seis ejes permite que los robots se muevan libremente como los humanos.
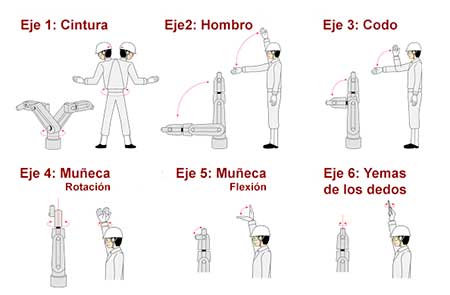
Equivalencia entre los movimientos humanos y del robot