
delta robot
La principal ventaja de los robots delta es que los motores pesados están fijados en el bastidor, lo que permite que las partes móviles del robot sean muy ligeras, lo que les permite alcanzar velocidades muy altas. Se utilizan frecuentemente para aplicaciones de empaquetado y en impresoras 3D.
Son un diseño del profesor Reymond Clavel de la École Polytechnique Fédérale de Lausanne en Suiza.
- Clavel, ReymondSuiza, 1950 -
- parallel link robotrobot de conexión paralela
- roboticsrobótica
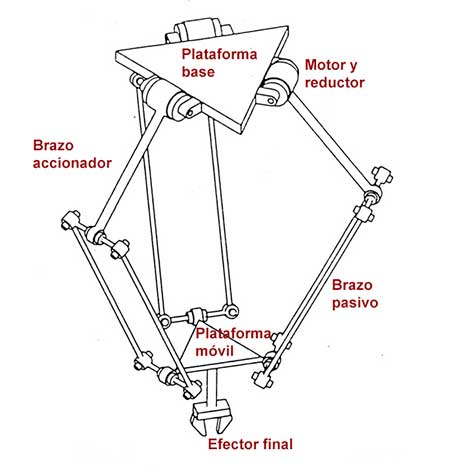
Diagrama de un robot delta
- 1950 junio 23
- Nace Reymond Clavel, creador de robot delta, en Fribourg, Suiza.